
Неразрушающий контроль

Неразрушающий контроль
О достоинствах и недостатках пространственной визуализации информации.
Бахарев В.Ю., Ершов С.Г.
Аннотация статьи по теме: Неразрушающий контроль.
В статье рассмотрены главные достоинства пространственной визуализации информации, получаемой при сканировании объектов неразрушающего контроля – к ним относятся значительное повышение чувствительности контроля к обнаружению дефектов и высокая способность к выделению дефекта от артефактов. Однако полностью автоматизировать процесс поиска недопустимых дефектов, основываясь только на визуальном представлении информации, представляется весьма затруднительным.
При использовании методов неразрушающего контроля (НК), например ультразвуковых, вихретоковых, магнитного рассеяния чаще всего требуется получить информацию о наличии или отсутствии дефектов в некоторой области объекта контроля. Это приводит к необходимости сканировать эту область Среди наиболее известных и распространенных методов сканирования используют два – механическое перемещение датчика по поверхности объекта или электронное, как например сканирование ультразвуковым пучком с помощью системы датчиков, образующих фазированную решетку.
В некоторых методах неразрушающего контроля основным результатом является непосредственно визуальная информация, это радиографический, магнитопорошковый, капиллярный и визуальный метод контроля.
Следует отметить, что в автоматизированных системах контроля важность визуального представление информации отходит на второй план: при контроле аппаратура должна сама зафиксировать недопустимый дефект, например, по амплитуде сигнала и произвести автоматическую разбраковку объектов на годные и негодные. В этом смысле выведение на экран любой информации, которую должен анализировать оператор, переводит систему в полуавтоматический режим работы. Обычно в автоматизированной дефектоскопии важно одно – есть или нет при сканировании сигналы, превышающие, например, предустановленный пороговый уровень. Анализ остальной визуальной информации осуществляется в основном человеком, именно на этой информации мы и хотим остановиться более подробно и показать ее несомненную ценность.
Для того чтобы наглядно продемонстрировать преимущества человеческого анализа визуальной информации над компьютерным, представьте себе, что Вам дали пачку фотографий детей, среди которых находится и фотография Вашего ребенка. Вы начинаете перебирать фотографии, останавливая свой взгляд на каждой из них. Для рассматривания одной фотографии Вам не потребуется времени больше, чем две-три секунды. Тем не менее, Вам хватит этого времени и Вы безусловно узнаете на одной из фотографий своего ребенка. Причем узнаете независимо от того, в фас или профиль будет фото, будет стоять, сидеть или лежать Ваш ребенок, какая на нем будет одежда, прическа, будет он один или в группе сверстников и т.д. Ваш мозг мгновенно обработает информацию и даст ответ – это Ваш ребенок. Решить аналогичную задачу не может ни один самый мощный компьютер, а Ваш мозг – может.
Причина кроется в том, что наш мозг ориентирован на восприятие и обработку зрительной информации в виде образов объектов, в отличие от компьютера, ориентированного на работу с последовательностью нулей и единиц. Не смотря на возможность выполнять громадное количество операций с нулями и единицами в секунду, «научить» компьютер понимать зрительную информацию – представляется весьма сложной задачей. В примитивном случае для того, что бы научить компьютер воспринимать зрительную информацию, в нашем примере необходимо в его память ввести все изображения вашего ребенка во всех ракурсах, со всеми прическами и т.д. Понятно, что это совсем не маленький объем информации. Но самое главное состоит в том, что даже внеся в память всю эту информацию мы совершенно не гарантированы от того, что на тестируемой фотографии ребенка его улыбка будет в точности соответствовать его улыбке, внесенной в память, и компьютер справится с задачей.
В настоящее время ведется больше количество работ и сосредоточены усилия многих программистов и математиков для решения задачи распознавания образа без предварительного внесения большого объема информации. Однако, до настоящего времени, несмотря на то, что частные задачи в различных приближениях успешно решаются, общий алгоритм не найден.
Но вернемся к нашей задаче. В ней требуется определить наличие или отсутствие дефекта. Дефекты могут быть различными - трещины, поры, расслоения материала, включения и т.д. лежащие на различной глубине и каждый из дефектов имеет свои характеристики. Например, трещина имеет много параметров - направление, длину, раскрытие, глубину. Такой параметр как «направление трещины» тоже имеет большое разнообразие, т.к. трещина может иметь сложную форму, быть прерывистой, состоять из большого числа мелких трещин и т.д. и т.д. Поэтому попытки описать все многообразие только, например, трещин, уже сталкивается с некоторыми трудностями. А дефекты могут быть различного типа, не только трещины и для автоматического их распознавания необходимо всю эту информацию внести в компьютер. Для оценки объема требуемой информации мы можем вспомнить пример о распознавании улыбки Вашего ребенка.
Реальная задача многократно усложняется еще и тем, что при контроле достаточно трудно обеспечить постоянство условий проведения контроля. Так, при магнитопорошковом контроле яркость и внешний вид трещины будут сильно зависеть от чистоты поверхности, качества и вида магнитопорошковой суспензии, угла падения света и угла зрения.
Теперь представим себе, что мы имеем изображение визуализированного любым способом объекта контроля. Пусть на изображении видно некоторое количество неоднородностей, которые являются следствием различных факторов. Как определить, какая из неоднородностей соответствует дефекту, а какая вызвана посторонними отражениями или любыми другими причинами? Эта задача во многом аналогична задаче поиска фотографии вашего ребенка, описанной выше. Только намного сложнее. Требуется найти не что- либо конкретное, что априори могло быть внесено в память компьютера, а все, что может быть дефектом, и отсеять все, что дефектом не является. Ваш ребенок – это дефект (извините, не очень удачное сравнение), который надо выделить среди очень похожих сигналов, но которые порождены не дефектом. Все многообразие параметров различных дефектов аналогично многообразию прически, одежды, позы и т.д. Вашего ребенка. Из всего этого хаоса отраженных сигналов и построенных по ним визуальному изображению Ваш мозг, пользуясь алгоритмами, присущими ему от рождения и отточенными на протяжении всего человеческого опыта начиная от Адама и Евы, успешно решает эту задачу, непосильную для компьютера. Причем Ваш мозг справляется с этой задачей практически без напряжений и усилий с вашей стороны.
При анализе изображения мы подсознательно пользуемся еще одним очень мощным компьютером. Этот компьютер не включен в спецификацию установок и за него не берут денег производители аппаратуры. Этот компьютер – мозг оператора, перерабатывающий визуальную информацию, так сказать «биологический» компьютер.
Рассмотрим в качестве примера рисунок 1, где представлены результаты низкочастотного ультразвукового сканирования тестовой поверхности композиционного материала с вклеенной полосой из пены, являющейся имитатором дефекта.
На изображении мы отчетливо видим эту вклейку в виде неоднородности распределения сигнала. Для интерпретации этой неоднородности, нам достаточно знать, что в материале нет никаких геометрических объектов в виде ребер жесткости, армирования и т.д. и тогда мы легко отождествляем наблюдаемую неоднородность с дефектом. Причем обратите внимание, имея визуальную информацию мы не только понимаем расположение непроклееных областей, мы замечаем, что неоднородности распределения сигнала, расположенные в левой части изображения в виде вертикальной светлой линии и горизонтальной темной являются аппаратурными артефактами, несмотря на то, что величина сигнала от артефактов значительно превышает шум и сигнал от дефектов. Помогли нам в этом визуализация объекта контроля с помощью сканирования и наш «биологический» компьютер. Попытки же написания алгоритма для автоматизированного поиска неоднородностей на изображении столкнуться с весьма большими проблемами.
Анализ рисунка высвечивает еще один эффект использования «биологического» компьютера, достойный упоминания.
На вставках рисунка сверху и слева представлены результаты сканирования по одной линии (амплитуда сигнала в некотором интервале частот) Видно, что при одиночном сканировании сигнал от имитатора дефекта не различим от шумов аппаратуры (это наиболее отчетливо наблюдается на горизонтальной линии), и нахождение полезного сигнала без сканирования просто не представляется возможным. Эксперименты показывают, что для уверенного выявления имитатора дефекта необходимо накопление сигнала примерно от 30 сканирований, т е. наш «биологический» компьютер позволил выполнить процедуру накопления и выделения сигнала из шума как и ранее, без трудностей и ошибок. Наш «биологический» компьютер выделил некоторый образ, в данном случае полосы, и установил, что в этих полосах сигнал отличается от сигнала, чем в соседних областях. Используя возможности нахождения образов при визуальном представлении информации наш мозг, обрабатывая информацию не только находит аномалии в картине распределения, но и существенно повышает достоверность измерений.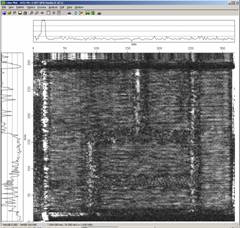

Рисунок 1. Образец из композитного материала с заполнением из пены, имитирующее дефект типа «непроклей» (справа) и результат сканирования образца на низкочастотном УЗ дефектоскопе (слева, изображение зеркальное). (Результаты любезно предоставлены президентом компании АТG (Чехия) Збынеком Завадилом)
Существует ряд методов контроля, в которых визуальное представление информации является исходным. К ним, кроме собственно визуального контроля, в основном, относятся магнитопорошковый, рентгеновский и капиллярный. Полная автоматизация обработки информации в этих методах весьма затруднительна. Здесь чаще предлагается вариант, при котором компьютер обрабатывает визуальную информацию и дает заключение о том, что в анализируемом изображении не содержится аномалий, которые могли бы быть признаны дефектами. При этом компьютер гарантировано не пропускает ни одной аномалии в картине распределения. Если же на изображении аномалия находится, то компьютер предлагает оператору воспользоваться своим «биологическим» инструментом и принять решение о природе аномалии. При этом оператор не занимается рутинной работой по просмотру всей получаемой информации, а сосредотачивает свои усилия для анализа только тех областей, которые могут содержать недопустимый дефект.
Таким образом, визуализация информации о распределении неоднородностей в объектах контроля, позволяющая использовать «биологический» компьютер, помогает оператору идентифицировать наличие или отсутствие недопустимых дефектов и сепарировать сигналы от дефектов от артефактов, причем порог выявляемости дефектов значительно понижается, т.е. могут быть выявлены дефекты, сигнал от которых практически не отличается от шума. Однако при автоматизированных методах контроля, где главным критерием недопустимости дефекта является предустановленный порог срабатывания аппаратуры, получение визуализированной информации представляется излишней.